深蓝学院10门课程合集
课程文件目录:深蓝学院10门课程合集[215.98G]
ROS机械臂开发从入门到实战[10.50G]
:
第10节针对工业应用的ROS-I又是什么[1.46G]
【代码】针对工业应用的ROS-I又是什么.zip[2.37M]
【课件】针对工业应用的ROS-I又是什么.pdf[3.15M]
针对工业应用的ROS-I又是什么.mp4[1.46G]
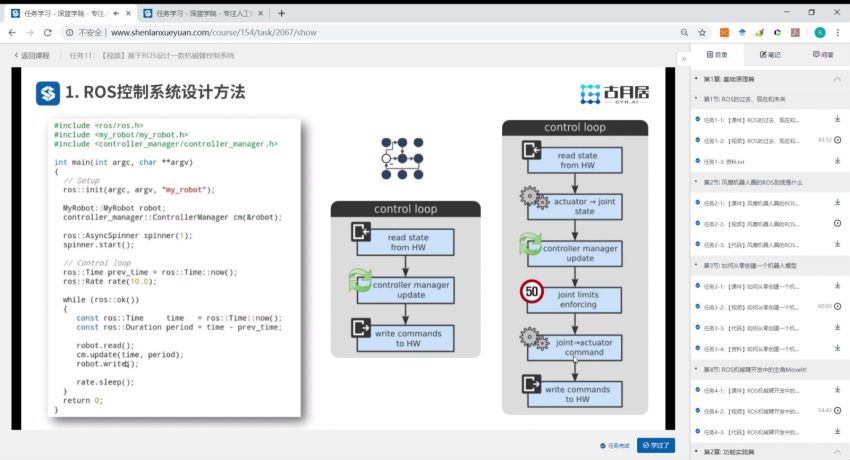
第11节基于ROS设计一款机械臂控制系统[621.13M]
【代码】基于ROS设计一款机械臂控制系统[7.97M]
PROBOT_Anno[7.97M]
docs[1.77M]
images[223.18K]
PROBOT_Anno.png[223.18K]
PROBOTAnno机械臂产品介绍.pdf[1.55M]
probot_anno_ikfast_manipulator_plugin[625.28K]
include[12.43K]
ikfast.h[12.43K]
src[608.17K]
probot_anno_manipulator_ikfast_moveit_plugin.cpp[55.42K]
probot_anno_manipulator_ikfast_solver.cpp[552.75K]
CMakeLists.txt[0.94K]
package.xml[3.10K]
probot_anno_manipulator_moveit_ikfast_plugin_description.xml[0.38K]
update_ikfast_plugin.sh[0.26K]
probot_anno_moveit_config[56.41K]
config[24.10K]
chomp_planning.yaml[0.49K]
controllers.yaml[0.17K]
controllers_gazebo.yaml[0.30K]
fake_controllers.yaml[0.17K]
joint_limits.yaml[1.08K]
joint_names.yaml[0.08K]
kinematics.yaml[0.20K]
ompl_planning(copy).yaml[8.50K]
ompl_planning.yaml[9.02K]
probot_anno.srdf[2.94K]
ros_controllers.yaml[0.74K]
sensors_3d.yaml[0.40K]
launch[30.25K]
chomp_planning_pipeline.launch.xml[0.51K]
default_warehouse_db.launch[0.72K]
demo.launch[2.54K]
fake_moveit_controller_manager.launch.xml[0.41K]
joystick_control.launch[0.62K]
move_group.launch[3.81K]
moveit.rviz[11.23K]
moveit_planning_execution.launch[0.92K]
moveit_rviz.launch[0.68K]
ompl_planning_pipeline.launch.xml[1.07K]
planning_context.launch[1.22K]
planning_pipeline.launch.xml[0.34K]
probot_anno_moveit_controller_manager.launch.xml[0.61K]
probot_anno_moveit_sensor_manager.launch.xml[0.02K]
ros_controllers.launch[0.67K]
run_benchmark_ompl.launch[0.92K]
sensor_manager.launch.xml[0.79K]
setup_assistant.launch[0.55K]
trajectory_execution.launch.xml[1.42K]
warehouse.launch[0.53K]
warehouse_settings.launch.xml[0.67K]
.setup_assistant[0.31K]
CMakeLists.txt[0.32K]
package.xml[1.43K]
probot_anno_with_gripper_moveit_config[49.75K]
config[19.58K]
chomp_planning.yaml[0.49K]
controllers_gazebo.yaml[0.49K]
fake_controllers.yaml[0.24K]
joint_limits.yaml[1.20K]
kinematics.yaml[0.19K]
ompl_planning.yaml[8.50K]
probot_anno.srdf[6.88K]
ros_controllers.yaml[1.20K]
sensors_3d.yaml[0.40K]
launch[28.08K]
chomp_planning_pipeline.launch.xml[0.52K]
default_warehouse_db.launch[0.75K]
demo.launch[2.60K]
fake_moveit_controller_manager.launch.xml[0.39K]
joystick_control.launch[0.62K]
move_group.launch[3.73K]
moveit.rviz[9.39K]
moveit_planning_execution.launch[0.79K]
moveit_rviz.launch[0.70K]
ompl_planning_pipeline.launch.xml[0.98K]
planning_context.launch[1.27K]
planning_pipeline.launch.xml[0.35K]
probot_anno_moveit_controller_manager.launch.xml[0.36K]
probot_anno_moveit_sensor_manager.launch.xml[0.02K]
ros_controllers.launch[0.72K]
run_benchmark_ompl.launch[0.97K]
sensor_manager.launch.xml[0.81K]
setup_assistant.launch[0.56K]
trajectory_execution.launch.xml[1.33K]
warehouse.launch[0.54K]
warehouse_settings.launch.xml[0.67K]
.setup_assistant[0.32K]
CMakeLists.txt[0.33K]
package.xml[1.44K]
probot_bringup[24.27K]
config[11.49K]
PROBOT_Anno.rviz[11.49K]
launch[3.12K]
probot_anno_bringup.launch[3.12K]
CMakeLists.txt[7.14K]
package.xml[2.52K]
probot_demo[72.50K]
scripts[33.31K]
moveit_attached_object_demo.py[4.12K]
moveit_cartesian_demo.py[4.61K]
moveit_circle_demo.py[5.29K]
moveit_fk_demo.py[2.17K]
moveit_ik_demo.py[3.65K]
moveit_revise_trejectory_demo.py[4.69K]
probot_demo.py[6.62K]
test_move.py[2.16K]
src[27.64K]
moveit_cartesian_demo.cpp[3.46K]
moveit_circle_demo.cpp[3.87K]
moveit_collision_demo.cpp[6.73K]
moveit_continue_trajectory_demo.cpp[4.09K]
moveit_fk_demo.cpp[1.91K]
moveit_ik_demo.cpp[2.87K]
moveit_random_demo.cpp[1.58K]
moveit_revise_trajectory_demo.cpp[3.12K]
CMakeLists.txt[8.61K]
package.xml[2.94K]
probot_description[3.41M]
launch[1.61K]
view_probot_anno.launch[0.80K]
view_probot_anno_with_gripper.launch[0.81K]
meshes[3.35M]
gripper[942.21K]
ax12.dae[139.50K]
ax12.stl[97.74K]
F10.stl[42.17K]
F11.stl[164.83K]
F2.stl[48.32K]
F3.stl[24.30K]
F4.stl[55.06K]
F9.stl[358.48K]
finger.stl[11.80K]
sensors[194.32K]
camera.STL[194.32K]
base_link.STL[230.65K]
link_1.STL[519.13K]
link_2.STL[362.78K]
link_3.STL[263.36K]
link_4.STL[531.72K]
link_5.STL[339.54K]
link_6.STL[49.89K]
urdf[38.07K]
sensors[2.89K]
camera.gazebo.xacro[1.69K]
camera.urdf.xacro[1.20K]
dynamixel_arm_hardware.xacro[14.44K]
gripper.xacro[3.04K]
materials.urdf.xacro[1.01K]
probot_anno.xacro[8.12K]
probot_anno_with_gripper.xacro[8.57K]
CMakeLists.txt[7.12K]
package.xml[2.89K]
urdf.rviz[6.11K]
probot_driver[1.24M]
bin[1.23M]
probot_cmd_interface[419.98K]
probot_io_interface[420.00K]
probot_log_interface[420.00K]
CMakeLists.txt[6.81K]
package.xml[2.49K]
probot_gazebo[26.40K]
config[1.55K]
probot_anno_gazebo_joint_states.yaml[0.19K]
probot_anno_trajectory_control.yaml[0.58K]
probot_anno_with_gripper_trajectory_control.yaml[0.79K]
launch[5.62K]
probot_anno[5.62K]
probot_anno_with_gripper[2.90K]
probot_anno_with_gripper_bringup_moveit.launch[0.69K]
probot_anno_with_gripper_gazebo_states.launch[0.66K]
probot_anno_with_gripper_gazebo_world.launch[1.22K]
probot_anno_with_gripper_trajectory_controller.launch[0.33K]
probot_anno_bringup_moveit.launch[0.65K]
probot_anno_gazebo_states.launch[0.66K]
probot_anno_gazebo_world.launch[1.13K]
probot_anno_trajectory_controller.launch[0.30K]
worlds[9.74K]
tableObj.world[4.35K]
tableObj2.world[5.38K]
CMakeLists.txt[6.98K]
package.xml[2.51K]
probot_grasping[34.07K]
include[7.35K]
probot_grasping[7.35K]
grasping_demo.h[4.51K]
vision_manager(1).h[2.84K]
launch[0.56K]
probot_anno_grasping_demo.launch[0.56K]
src[14.48K]
grasping_demo.cpp[8.18K]
vision_manager.cpp[6.31K]
CMakeLists.txt[7.72K]
package.xml[3.96K]
probot_msgs[11.49K]
msg[1.45K]
ControllerCtrl.msg[0.01K]
IOStatus.msg[0.07K]
JogJoint.msg[0.55K]
JogPose.msg[0.76K]
SetOutputIO.msg[0.06K]
CMakeLists.txt[7.08K]
package.xml[2.96K]
probot_rviz_plugin[522.28K]
plugin[510.30K]
libprobot_rviz_plugin.so[510.30K]
CMakeLists.txt[7.87K]
package.xml[3.17K]
plugin_description.xml[0.93K]
probot_vision_pick[156.46K]
probot_pick_place[16.56K]
config[0.18K]
pick_place_config.yaml[0.18K]
scripts[5.92K]
probot_sorting_demo.py[5.92K]
CMakeLists.txt[7.09K]
package.xml[3.37K]
probot_vision[139.90K]
config[0.69K]
vision_config.yaml[0.69K]
doc[65.74K]
calibration.xlsx[7.92K]
calibration_chart.docx[57.82K]
launch[1.85K]
deal_data.launch[0.30K]
object_detect.launch[0.55K]
object_detect_test.launch[0.32K]
usb_cam.launch[0.68K]
msg[0.11K]
VisionMatrix.msg[0.11K]
scripts[43.39K]
__pycache__[5.11K]
detector.cpython-35.pyc[5.11K]
.object_detect.py.swo[16.00K]
detector.py[9.42K]
detector.pyc[5.84K]
ObjectDetect.py[4.36K]
ReadAndWriteYaml.py[2.66K]
src[15.16K]
AdjustColorThreshold.cpp[4.24K]
ComputeMapMatrix.cpp[10.91K]
srv[0.57K]
DetectObjectSrv.srv[0.57K]
calibration.txt[0.11K]
CMakeLists.txt[8.03K]
logitech920_calibration.yaml[0.66K]
package.xml[3.60K]
install.sh[4.81K]
LICENSE[11.29K]
README.md[3.70K]
【代码】基于ROS设计一款机械臂控制系统.zip[7.54M]
基于ROS设计一款机械臂控制系统.mp4[590.30M]
基于ROS设计一款机械臂控制系统.zip[12.74M]
课件_ROS机械臂开发_11.基于ROS设计一款机械臂控制系统.pdf[2.57M]
第12节ROS—机器人开发的神兵利器[512.77M]
【课件】ROS——机器人开发的神兵利器.pdf[3.59M]
ROS—机器人开发的神兵利器.mp4[509.18M]
第1节ROS的过去、现在和未来[606.18M]
ROS的过去、现在和未来.mp4[603.54M]
课件_ROS机械臂开发_1.ROS的过去、现在和未来.pdf[2.64M]
资料(2).txt[0.07K]
第2节风靡机器人圈的ROS到底是什么[556.12M]
【代码】风靡机器人圈的ROS到底是什么.zip[16.53K]
【课件】风靡机器人圈的ROS到底是什么.pdf[3.99M]
风靡机器人圈的ROS到底是什么.mp4[552.11M]
第3节如何从零创建一个机器人模型[869.36M]
【代码】如何从零创建一个机器人模型[6.14M]
marm_description[27.80K]
launch[0.77K]
view_marm.launch[0.77K]
urdf[12.34K]
marm.xacro[12.34K]
CMakeLists.txt[6.68K]
package.xml[2.13K]
urdf.rviz[5.89K]
ur3[6.11M]
config[0.09K]
joint_names_ur3.yaml[0.09K]
launch[1.07K]
display.launch[0.54K]
gazebo.launch[0.53K]
meshes[6.10M]
base_link.STL[248.42K]
link1.STL[1.47M]
link2.STL[1.95M]
link3.STL[1.01M]
link4.STL[673.52K]
link5.STL[673.52K]
link6.STL[115.32K]
textures
urdf[8.01K]
ur3.urdf[8.01K]
CMakeLists.txt[0.27K]
package.xml[0.64K]
如何从零创建一个机器人模型[4.16M]
sw2urdfSetup.exe[1.09M]
ur3step.zip[3.07M]
【课件】如何从零创建一个机器人模型.pdf[2.90M]
如何从零创建一个机器人模型.mp4[856.15M]
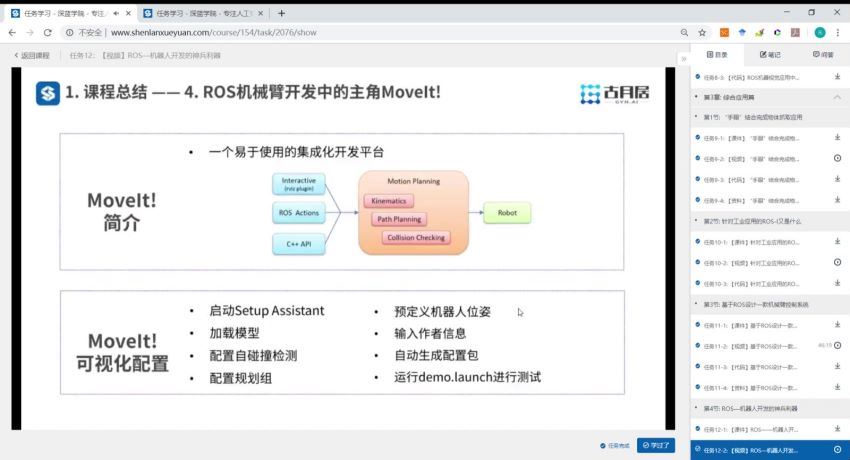
第4节ROS机械臂开发中的主角MoveIt![875.68M]
ROS机械臂开发中的主角MoveIt!.rar[871.68M]
代码_ROS机械臂开发_4.ROS机械臂开发中的主角MoveIt!.zip[694.74K]
课件_ROS机械臂开发_4.ROS机械臂开发中的主角MoveIt!.pdf[3.32M]
第5节搭建仿真环境一样玩转ROS机械臂[1.00G]
【代码】搭建仿真环境一样玩转ROS机械臂.rar[632.82K]
【课件】搭建仿真环境一样玩转ROS机械臂.pdf[2.41M]
搭建仿真环境一样玩转ROS机械臂.mp4[627.51M]
搭建仿真环境一样玩转ROS机械臂.rar[397.29M]
第6节MoveIt!编程驾驭机械臂运动控制[810.88M]
【代码】MoveIt!编程驾驭机械臂运动控制.zip[682.96K]
【课件】MoveIt!编程驾驭机械臂运动控制.pdf[2.83M]
6MoveIt!编程驾驭机械臂运动控制.rar[807.38M]
第7节MoveIt!中不得不说的“潜规则”[963.69M]
:
【代码】MoveIt!中不得不说的“潜规则”.zip[791.55K]
【课件】MoveIt!中不得不说的“潜规则”.pdf[2.46M]
MoveIt!中不得不说的“潜规则”.mp4[915.78M]
MoveIt!中不得不说的“潜规则”.zip[637.84K]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
第8节ROS机器视觉应用中的关键点[1.11G]
【代码】ROS机器视觉应用中的关键点[3.51M]
probot_anno_with_gripper_moveit_config[48.60K]
config[19.21K]
chomp_planning.yaml[0.47K]
controllers_gazebo.yaml[0.47K]
fake_controllers.yaml[0.23K]
joint_limits.yaml[1.16K]
kinematics.yaml[0.18K]
ompl_planning.yaml[8.36K]
probot_anno.srdf[6.79K]
ros_controllers.yaml[1.16K]
sensors_3d.yaml[0.39K]
launch[27.37K]
chomp_planning_pipeline.launch.xml[0.51K]
default_warehouse_db.launch[0.73K]
demo.launch[2.54K]
fake_moveit_controller_manager.launch.xml[0.38K]
joystick_control.launch[0.61K]
move_group.launch[3.66K]
moveit.rviz[9.07K]
moveit_planning_execution.launch[0.77K]
moveit_rviz.launch[0.69K]
ompl_planning_pipeline.launch.xml[0.96K]
planning_context.launch[1.24K]
planning_pipeline.launch.xml[0.34K]
probot_anno_moveit_controller_manager.launch.xml[0.35K]
probot_anno_moveit_sensor_manager.launch.xml[0.02K]
ros_controllers.launch[0.71K]
run_benchmark_ompl.launch[0.95K]
sensor_manager.launch.xml[0.79K]
setup_assistant.launch[0.54K]
trajectory_execution.launch.xml[1.31K]
warehouse.launch[0.53K]
warehouse_settings.launch.xml[0.66K]
.setup_assistant[0.31K]
CMakeLists.txt[0.32K]
package.xml[1.40K]
probot_description[3.41M]
launch[1.58K]
view_probot_anno.launch[0.78K]
view_probot_anno_with_gripper.launch[0.79K]
meshes[3.35M]
gripper[941.99K]
ax12.dae[139.28K]
ax12.stl[97.74K]
F10.stl[42.17K]
F11.stl[164.83K]
F2.stl[48.32K]
F3.stl[24.30K]
F4.stl[55.06K]
F9.stl[358.48K]
finger.stl[11.80K]
sensors[194.32K]
camera.STL[194.32K]
base_link.STL[230.65K]
link_1.STL[519.13K]
link_2.STL[362.78K]
link_3.STL[263.36K]
link_4.STL[531.72K]
link_5.STL[339.54K]
link_6.STL[49.89K]
urdf[37.33K]
sensors[2.81K]
camera.gazebo.xacro[1.64K]
camera.urdf.xacro[1.16K]
dynamixel_arm_hardware.xacro[13.99K]
gripper.xacro[2.95K]
materials.urdf.xacro[0.96K]
probot_anno.xacro[8.05K]
probot_anno_with_gripper.xacro[8.57K]
CMakeLists.txt[6.91K]
package.xml[2.82K]
urdf.rviz[5.91K]
probot_gazebo[25.62K]
config[1.50K]
probot_anno_gazebo_joint_states.yaml[0.18K]
probot_anno_trajectory_control.yaml[0.56K]
probot_anno_with_gripper_trajectory_control.yaml[0.76K]
launch[5.49K]
probot_anno[5.49K]
probot_anno_with_gripper[2.83K]
probot_anno_with_gripper_bringup_moveit.launch[0.68K]
probot_anno_with_gripper_gazebo_states.launch[0.64K]
probot_anno_with_gripper_gazebo_world.launch[1.19K]
probot_anno_with_gripper_trajectory_controller.launch[0.33K]
probot_anno_bringup_moveit.launch[0.63K]
probot_anno_gazebo_states.launch[0.64K]
probot_anno_gazebo_world.launch[1.10K]
probot_anno_trajectory_controller.launch[0.29K]
worlds[9.39K]
tableObj.world[4.20K]
tableObj2.world[5.19K]
CMakeLists.txt[6.78K]
package.xml[2.46K]
probot_vision[29.18K]
doc[4.89K]
checkerboard.pdf[4.89K]
include[3.26K]
probot_vision[3.26K]
vision_manager.h[3.26K]
launch[0.91K]
usb_cam.launch[0.38K]
usb_cam_with_calibration.launch[0.53K]
src[8.54K]
image_converter.cpp[1.59K]
vision_manager.cpp[6.95K]
camera_calibration.yaml[0.64K]
CMakeLists.txt[7.06K]
package.xml[3.87K]
【代码】ROS机器视觉应用中的关键点.zip[1.03M]
【课件】ROS机器视觉应用中的关键点.pdf[2.39M]
任务学习-深蓝学院-专注人工智能的在线教育-GoogleChrome2019_4_1910_44_58.mp4[1.10G]
第9节“手眼”结合完成物体抓取应用[1.20G]
“手眼”结合完成物体抓取应用[5.63M]
PROBOTAnno手眼标定步骤(easy_handeye-眼在外).pdf[5.63M]
【代码】“手眼”结合完成物体抓取应用[3.51M]
probot_anno_with_gripper_moveit_config[48.60K]
config[19.21K]
chomp_planning.yaml[0.47K]
controllers_gazebo.yaml[0.47K]
fake_controllers.yaml[0.23K]
joint_limits.yaml[1.16K]
kinematics.yaml[0.18K]
ompl_planning.yaml[8.36K]
probot_anno.srdf[6.79K]
ros_controllers.yaml[1.16K]
sensors_3d.yaml[0.39K]
launch[27.37K]
chomp_planning_pipeline.launch.xml[0.51K]
default_warehouse_db.launch[0.73K]
demo.launch[2.54K]
fake_moveit_controller_manager.launch.xml[0.38K]
joystick_control.launch[0.61K]
move_group.launch[3.66K]
moveit.rviz[9.07K]
moveit_planning_execution.launch[0.77K]
moveit_rviz.launch[0.69K]
ompl_planning_pipeline.launch.xml[0.96K]
planning_context.launch[1.24K]
planning_pipeline.launch.xml[0.34K]
probot_anno_moveit_controller_manager.launch.xml[0.35K]
probot_anno_moveit_sensor_manager.launch.xml[0.02K]
ros_controllers.launch[0.71K]
run_benchmark_ompl.launch[0.95K]
sensor_manager.launch.xml[0.79K]
setup_assistant.launch[0.54K]
trajectory_execution.launch.xml[1.31K]
warehouse.launch[0.53K]
warehouse_settings.launch.xml[0.66K]
.setup_assistant[0.31K]
CMakeLists.txt[0.32K]
package.xml[1.40K]
probot_description[3.41M]
launch[1.58K]
view_probot_anno.launch[0.78K]
view_probot_anno_with_gripper.launch[0.79K]
meshes[3.35M]
gripper[941.99K]
ax12.dae[139.28K]
ax12.stl[97.74K]
F10.stl[42.17K]
F11.stl[164.83K]
F2.stl[48.32K]
F3.stl[24.30K]
F4.stl[55.06K]
F9.stl[358.48K]
finger.stl[11.80K]
sensors[194.32K]
camera.STL[194.32K]
base_link.STL[230.65K]
link_1.STL[519.13K]
link_2.STL[362.78K]
link_3.STL[263.36K]
link_4.STL[531.72K]
link_5.STL[339.54K]
link_6.STL[49.89K]
urdf[37.33K]
sensors[2.81K]
camera.gazebo.xacro[1.64K]
camera.urdf(1).xacro[1.16K]
dynamixel_arm_hardware.xacro[13.99K]
gripper.xacro[2.95K]
materials.urdf.xacro[0.96K]
probot_anno.xacro[8.05K]
probot_anno_with_gripper.xacro[8.57K]
CMakeLists.txt[6.91K]
package.xml[2.82K]
urdf.rviz[5.91K]
probot_gazebo[25.62K]
config[1.50K]
probot_anno_gazebo_joint_states.yaml[0.18K]
probot_anno_trajectory_control.yaml[0.56K]
probot_anno_with_gripper_trajectory_control.yaml[0.76K]
launch[5.49K]
probot_anno[5.49K]
probot_anno_with_gripper[2.83K]
probot_anno_with_gripper_bringup_moveit(1).launch[0.68K]
probot_anno_with_gripper_gazebo_states.launch[0.64K]
probot_anno_with_gripper_gazebo_world.launch[1.19K]
probot_anno_with_gripper_trajectory_controller.launch[0.33K]
probot_anno_bringup_moveit.launch[0.63K]
probot_anno_gazebo_states.launch[0.64K]
probot_anno_gazebo_world.launch[1.10K]
probot_anno_trajectory_controller.launch[0.29K]
worlds[9.39K]
tableObj.world[4.20K]
tableObj2.world[5.19K]
CMakeLists.txt[6.78K]
package.xml[2.46K]
probot_grasping[31.88K]
include[7.10K]
probot_grasping[7.10K]
grasping_demo.h[4.36K]
vision_manager.h[2.74K]
launch[0.55K]
probot_anno_grasping_demo.launch[0.55K]
src[12.86K]
grasping_demo.cpp[6.76K]
vision_manager.cpp[6.10K]
CMakeLists.txt[7.50K]
package.xml[3.88K]
“手眼”结合完成物体抓取应用.mp4[1.19G]
“手眼”结合完成物体抓取应用.zip[5.63M]
【代码】“手眼”结合完成物体抓取应用.zip[1.03M]
【课件】“手眼”结合完成物体抓取应用.pdf[2.81M]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
ROS理论与实践[2.40G]
ROS2019暑假学习课程
本地下载
第1章ROS在企业和科研中的应用(1)
第2章ROS在企业和科研中的应用(2)
第3章ROS基础与进阶
第4章ROS-I与工业机器人应用
第5章ROS2与实时系统
第6章人工智能(深度学习、强化学习)
第7章人形机器人与无人机
第8章SLAM
第1讲:认识ROS
第1讲资料
课件视频
第2讲:ROS基础
第3讲:机器人系统设计[577.35M]
:
ROS理论与实践_3.机器人系统设计_代码.zip[187.71K]
ROS理论与实践_3.机器人系统设计_课件.pdf[4.95M]
ROS理论与实践_3.机器人系统设计_视频.mp4[528.11M]
ROS理论与实践_3.机器人系统设计_作业.pdf[68.38K]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
第4讲:机器人仿真
第5讲:机器人感知
第6讲:机器人SLAM与自主导航
第7讲:ROS理论与实践Moveit[854.34M]
ROS理论与实践_7.Moveit!机械臂控制_代码.zip[54.26K]
ROS理论与实践_7.Moveit!机械臂控制_课件.pdf[6.12M]
ROS理论与实践_7.Moveit!机械臂控制_视频.mp4[848.06M]
ROS理论与实践_7.Moveit!机械臂控制_作业.pdf[108.21K]
第8讲:ROS机器人综合应用[615.41M]
ROS理论与实践_8.ROS机器人综合应用_代码.zip[446.51K]
ROS理论与实践_8.ROS机器人综合应用_课件.pdf[6.32M]
ROS理论与实践_8.ROS机器人综合应用_视频.mp4[608.51M]
ROS理论与实践_8.ROS机器人综合应用_作业.pdf[150.30K]
第9讲:ROS2.0[410.98M]
ROS理论与实践_9.ROS2.0_代码.zip[11.91K]
ROS理论与实践_9.ROS2.0_课件.pdf[6.72M]
ROS理论与实践_9.ROS2.0_视频.mp4[404.12M]
ROS理论与实践_9.ROS2.0_作业.pdf[132.27K]
从零手写Vio[7.78G]
第1节概述与课程介绍[940.19M]
任务1-1:【课件】第1节概述与课程介绍.pdf[5.52M]
任务1-2:【视频】概述与课程介绍(上).flv[548.86M]
任务1-3:【视频】概述与课程介绍(下).flv[370.14M]
任务1-4作业以及答案.zip[5.43M]
任务1-5:课程预习资料.rar[10.23M]
第2节IMU传感器[1.04G]
任务2-1:第2节IMU传感器(新版).pdf[1.18M]
任务2-2:【视频】IMU传感器(上).flv[658.52M]
任务2-3:【视频】IMU传感器(下).flv[402.16M]
任务2-4作业及答案.zip[1.82M]
任务2-5VIO第2节代码.zip[1.26M]
第3节基于优化的IMU预积分与视觉信息融合[1.54G]
VIO-hw3-答案.pdf[1.98M]
代码以及作业以及答案.7z[2.29M]
任务3-1:第3节:基于优化的IMU预积分与视觉信息融合.pdf[1.08M]
任务3-2:【视频】基于优化的IMU预积分与视觉信息融合(上).flv[749.57M]
任务3-3:【视频】基于优化的IMU预积分与视觉信息融合(下).flv[822.56M]
第4节滑动窗口算法理论:VIO融合及其可观性与一致性[1.20G]
【课件】第4节:滑动窗口理论.pdf[1.18M]
nrsl-hw4-答案.pdf[106.01K]
代码,作业,答案.zip[328.71K]
任务5-2:【视频】滑动窗口算法理论(上).flv[555.18M]
任务5-3:【视频】滑动窗口算法理论(下).flv[667.69M]
第5节滑动窗口算法实践:逐行手写求解器[954.77M]
VIO-hw5-提升作业.pdf[649.46K]
第5节滑动窗口算法实践.pdf[1.10M]
任务6-2:【视频】Solver流程回顾及代码讲解.flv[618.12M]
任务6-3:【视频】滑动窗口算法回顾及代码实践.flv[334.53M]
作业代码答案.zip[396.63K]
第6节视觉前端[1.02G]
VIO-nrsl-hw6.zip[515.02K]
第6节:视觉前端.pdf[4.13M]
任务7-2:【视频】视觉前端(上)(2).flv[315.04M]
任务7-3:【视频】视觉前端(下).flv[727.79M]
作业代码.zip[611.31K]
第7节VINS系统构建[1.13G]
VIO第7节Initialization.pdf[813.54K]
任务8-2:【视频】VINS系统构建(上).flv[619.81M]
任务8-3:【视频】VINS系统构建(下).flv[521.06M]
作业代码答案.zip[19.08M]
大作业.zip[987.04K]
多传感器融合[5.26G]
第八章_传感器时空标定[234.24M]
参考文献.zip[57.67M]
传感器时空标定.mp4[175.44M]
大作业.jpg[67.86K]
多传感器融合定位-第8章.pdf[1.07M]
第二章_点云地图构建及基于地图的定位[712.53M]
第1节_内容回顾[17.88M]
任务11内容回顾.mp4[17.88M]
第2节_回环检测及代码实现[335.74M]
ScanContext:EgocentricSpatialDescriptorforPlaceRecognition.pdf[4.59M]
任务12回环检测.mp4[331.14M]
第3节_后端优化与点云地图构建[168.78M]
任务13后端优化与点云地图构建.mp4[168.78M]
第4节_基于点云地图的定位[27.54M]
任务14基于点云地图的定位.mp4[27.54M]
第5节_作业代码讲解[160.53M]
【讲评】第二次作业.pdf[3.08M]
sensorfusionchapter3.zip[12.55M]
任务15作业代码讲解.mp4[144.90M]
多传感器融合定位-第2章.pdf[2.07M]
第六章_基于图优化的融合方法[542.22M]
第1节基于预积分的融合方案流程[45.52M]
任务42基于预积分的融合方案流程.mp4[45.52M]
第2节预积分模型推导[233.82M]
任务43预积分模型推导.mp4[233.82M]
第3节典型方案介绍[216.39M]
LIO-SAM-master.zip[64.11M]
任务44典型方案介绍.mp4[152.28M]
第4节融合编码器的优化方案[11.83M]
任务45融合编码器的优化方案.mp4[11.83M]
第5节作业[32.79M]
任务46作业.mp4[32.79M]
多传感器融合定位-L6.pdf[1.88M]
第七章_基于图优化的地图定位[422.00M]
第1节流程介绍[78.47M]
基于图优化的流程介绍.mp4[78.47M]
第2节边缘化原理及应用[40.92M]
边缘化原理及应用.mp4[40.92M]
第3节基于KITTI的原理实现[106.69M]
基于KITTI的原理实现.mp4[106.69M]
第4节LIO-mapping[168.88M]
lio-mapping.mp4[167.57M]
lio-mapping-comment-master.rar[1.31M]
第5节作业[20.64M]
作业讲解.mp4[20.64M]
多传感器融合定位-第7章-2.0.pdf[6.40M]
第三章_惯性导航原理及误差分析[779.92M]
:
第1节惯性技术简介[138.67M]
:
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
任务18惯性技术简介.mp4[94.62M]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
第2节IMU误差分析及处理[40.52M]
任务19惯性器件误差分析.mp4[40.52M]
第3节内参标定[191.78M]
任务20惯性器件内参标定.mp4[191.78M]
第4节IMU温补[33.36M]
任务21惯性器件温补.mp4[33.36M]
第5节惯性导航解算方法[209.26M]
任务22惯性导航解算.mp4[209.26M]
第6节惯性导航误差模型[89.60M]
任务23惯性导航误差分析.mp4[89.60M]
第7节作业[29.74M]
【讲评】第三次作业.pdf[29.74M]
多传感器融合定位-第3章.pdf[2.95M]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
第四章_基于滤波的融合方法[828.89M]
第1节概率基础知识[106.38M]
任务29概率基础知识.mp4[106.38M]
第2节滤波器基本原理[294.31M]
任务30滤波器基本原理.mp4[294.31M]
第3节基于滤波器的融合实现[210.75M]
任务31基于滤波器的融合.mp4[210.75M]
第4节基于KITTI数据集的融合实现[213.99M]
任务32观测性与观测度分析.mp4[213.99M]
第5节作业[78.00K]
第四章作业.jpg[78.00K]
多传感器融合定位-第4章.pdf[3.37M]
第五章_基于滤波的融合方法进阶[686.82M]
第1节融合编码器和融合约束的滤波方法[205.90M]
任务35融合编码器和融合运动约束的滤波方法.mp4[205.90M]
第2节组合导航的常见现象解释[297.14M]
任务36组合导航常见现象解释.mp4[297.14M]
第3节融合磁力计和融合点云特征的滤波方法[177.06M]
任务37融合磁力计和融合点云特征的滤波方法.mp4[177.06M]
第4节作业及代码[4.86M]
LINSLiDAR-inertial-SLAM-master.zip[4.86M]
磁场强度查表方法.zip[5.03K]
多传感器融合定位-第5章-V2.3.pdf[1.85M]
第一章_3D激光里程计[1.15G]
第1节_课程导读[406.65M]
任务1-1课程概述.mp4[108.37M]
任务1-2激光雷达工作原理及应用.mp4[298.29M]
第2节_里程计方案ICP&NDT理论讲解[279.20M]
任务2-1激光传感器原理.pptx[8.43M]
任务2-23D激光里程计.pdf[2.27M]
任务3-1前端里程计-ICP.mp4[131.28M]
任务3-2前端里程计-NDT.mp4[137.22M]
第3节_里程计方案及代码讲解[119.76M]
任务4前端里程计LOAM系列.mp4[119.76M]
第4节_数据集及其精度评价方法[34.58M]
任务5数据集实现及精度评价方法.mp4[34.58M]
第5节_LOAM代码讲解[272.66M]
任务6LOAM代码部分讲解.mp4[272.66M]
第6节_LeAM-LOAM代码讲解[61.16M]
任务7LeAM-LOAM代码讲解.mp4[61.16M]
第7节_作业[2.25M]
【讲评】第一次作业.pdf[830.23K]
chapter_1.rar[1.44M]
概率图模型=[2.92G]
01.视频[2.88G]
01.任务1:【视频】PGM简介_.mp4[642.78M]
02.任务2:【视频】概率论与图论基础知识_.mp4[56.34M]
03.任务3:【视频】贝叶斯网络_.mp4[180.07M]
04.任务4:【视频】马尔科夫随机场_.mp4[154.47M]
05.任务5:【视频】因子图_.mp4[205.31M]
07.任务7:【视频】推理问题分类及意义&变量消元法_.mp4[145.03M]
08.任务8:【视频】团树传播算法_.mp4[121.13M]
09.任务9:【视频】信念传播算法_.mp4[78.91M]
10.任务10:【视频】二值图切法_.mp4[76.67M]
11.任务11:【视频】精确推理作业_.mp4[95.05M]
12.任务12:【视频】BP算法_.mp4[114.12M]
13.任务13:【视频】基于约束松弛和对偶分解的近似推理_.mp4[189.47M]
14.1任务14:【视频】基于图切法的近似推理_.mp4[80.13M]
14.任务14:【视频】基于采样的近似推理_.mp4[80.16M]
15.任务15:【视频】近似推理作业_.mp4[225.31M]
16.任务16:【视频】参数学习_.mp4[71.93M]
17.任务17:【视频】结构学习_.mp4[49.66M]
18.任务18:【视频】概率图模型的应用_.mp4[117.10M]
19.任务19:【视频】概率图模型的应用2_.mp4[143.27M]
任务20:【视频】作业讲解_.mp4[125.66M]
02.资料[37.64M]
06.第二章小结和作业答案[4.29M]
PGM_HW1.rar[3.81M]
PGM表示-小结.pdf[494.44K]
01.PGM简介.pdf[788.94K]
02.PGM表示-概率论与图论基础知识.pdf[769.27K]
03.PGM表示-贝叶斯网络.pdf[782.21K]
04.PGM表示-马尔科夫随机场.pdf[719.67K]
05.PGM表示-马尔科夫随机场_2.pdf[719.67K]
07.推理问题分类及意义&变量消元法.pdf[7.31M]
08.团树传播算法.pdf[3.91M]
09.信念传播算法.pdf[4.70M]
10.二值图切法.pdf[3.33M]
11.PGM_HW2.rar[11.48K]
12.PGM近似推理4-1.pdf[662.68K]
13【课件】基于约束松弛和对偶分解的近似推理.pdf[0.99M]
14.【课件】基于采样、图切法的近似推理.pdf[1.40M]
15.【代码】PGM近似推理.rar[3.81M]
15.【课件】PGM近似推理作业.pdf[370.71K]
16.【课件】参数学习.pdf[577.02K]
17.【课件】结构学习.pdf[444.74K]
18.【课件】概率图模型的应用.pdf[1.02M]
19.PGM应用v5.pdf[1.17M]
机器人学中的状态估计
第八章
第二章
第六章
第七章
第三章
:
加大声音版
第四章
第五章
第一章
声音问题
现在直接观看avc的视频
基于图像的三维重建[7.43G]
:
02第二章特征点的检测与匹配[5.52M]
这一章为图文教程。没有视频
1Slide-1特征检测与匹配.pdf[5.52M]
03第三章相机模型与对极几何[843.10M]
03相机模型与对极几何.ts[841.57M]
class2-相机模型与对极几何.pdf[1.53M]
04第四章从运动到结构[1.34G]
【课件】双视角SFM(上).pdf[1.77M]
【课件】双视角SFM(下).pdf[9.34M]
04双视角SFM.ts[606.94M]
04增量SFM.ts[752.65M]
05第五章稠密重建[784.23M]
:
05稠密点云重建.ts[727.65M]
slide5-multiview-stereo.pdf[12.53M]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
06第六章点云到网格的重建[684.20M]
06点云到网格的重建.ts[681.64M]
Slide-6surface_reconstruction.pdf[2.57M]
ImageBasedModellingEduV1.0-master[75.36M]
.idea[2.78K]
codeStyles[1.88K]
codeStyleConfig.xml[0.15K]
Project.xml[1.73K]
dictionaries[0.08K]
caoqi.xml[0.08K]
.name[0.02K]
ImageBasedModellingEduV1.0.iml[0.09K]
misc.xml[0.23K]
modules.xml[0.30K]
vcs.xml[0.18K]
3rdParty[422.85K]
coldet[143.16K]
libcoldet[7.22K]
libcoldet.vcxproj[4.49K]
libcoldet.vcxproj.filters[2.72K]
src[99.30K]
bitmatrix.h[4.49K]
box.cpp[7.57K]
box.h[6.60K]
box_bld.cpp[5.10K]
cdmath3d.cpp[2.78K]
cdmath3d.h[9.76K]
coldet.cpp[10.27K]
coldet.h[6.89K]
coldet_bld.cpp[2.39K]
coldetimpl.h[3.66K]
makefile[0.63K]
multi_impl.h[7.53K]
multiobject.cpp[1.21K]
multiobject.h[3.46K]
mytritri.cpp[2.47K]
mytritri.h[2.46K]
sweep_prune.h[8.97K]
sysdep.cpp[1.29K]
sysdep.h[2.22K]
tritri.c[9.54K]
tests[9.46K]
unit[9.46K]
main.cpp[2.89K]
makefile[0.22K]
unit.sln[1.29K]
unit.vcxproj[4.16K]
unit.vcxproj.filters[0.91K]
CMakeLists.txt[0.35K]
COPYING[25.81K]
readme.txt[1.02K]
gco[234.36K]
matlab[60.00K]
GCO_BuildLib.m[2.87K]
GCO_ComputeEnergy.m[0.37K]
GCO_Create.m[0.50K]
GCO_Delete.m[0.21K]
GCO_ExpandOnAlpha.m[0.29K]
GCO_Expansion.m[1.04K]
GCO_GetLabeling.m[0.64K]
GCO_ListHandles.m[0.35K]
GCO_LoadLib.m[0.48K]
gco_matlab.cpp[20.00K]
GCO_SetDataCost.m[2.21K]
GCO_SetLabelCost.m[1.80K]
GCO_SetLabeling.m[0.75K]
GCO_SetLabelOrder.m[0.58K]
GCO_SetNeighbors.m[1.14K]
GCO_SetSmoothCost.m[1.50K]
GCO_SetVerbosity.m[1.10K]
GCO_Swap.m[0.67K]
GCO_UnitTest.m[16.05K]
README.TXT[7.45K]
block.h[7.05K]
CMakeLists.txt[0.28K]
energy.h[9.87K]
example.cpp[12.92K]
GCO_README.TXT[20.53K]
GCoptimization.cpp[58.24K]
GCoptimization.h[26.21K]
graph.cpp[2.83K]
graph.h[16.89K]
LinkedBlockList.cpp[1.35K]
LinkedBlockList.h[1.67K]
maxflow.cpp[16.50K]
gflags
mrf[45.33K]
.idea[9.74K]
.name
misc.xml[0.65K]
modules.xml[0.25K]
mrf.iml[0.27K]
vcs.xml[0.16K]
workspace.xml[8.41K]
cmake_install.cmake[1.63K]
CMakeCache.txt[12.24K]
CMakeLists.txt[0.22K]
gco_graph.cpp[2.15K]
gco_graph.h[1.01K]
graph.cpp[0.84K]
graph.h[1.33K]
icm_graph.cpp[2.49K]
icm_graph.h[1.32K]
lbp_graph.cpp[4.78K]
lbp_graph.h[1.55K]
Makefile[6.02K]
cmake[13.20K]
FindEigen.cmake[1.93K]
FindTBB.cmake[11.27K]
core[442.36K]
bundle.cc[2.73K]
bundle.h[3.30K]
bundle_io.cc[15.14K]
bundle_io.h[2.31K]
camera.cc[8.56K]
camera.h[5.55K]
CMakeLists.txt[1.60K]
defines.h[1.00K]
depthmap.cc[18.16K]
depthmap.h[6.02K]
image.h[12.57K]
image_base.h[12.88K]
image_color.h[9.07K]
image_drawing.h[4.56K]
image_exif.cc[18.28K]
image_exif.h[3.36K]
image_io.cc[33.27K]
image_io.h[6.82K]
image_tools.cc[5.36K]
image_tools.h[57.74K]
Makefile[0.41K]
Makefile.dep[6.61K]
marching.cc[19.59K]
marching_cubes.h[5.33K]
marching_tets.h[6.03K]
mesh.cc[8.55K]
mesh.h[10.00K]
mesh_info.cc[5.43K]
mesh_info.h[4.44K]
mesh_io.cc[2.23K]
mesh_io.h[0.79K]
mesh_io_npts.cc[2.86K]
mesh_io_npts.h[0.87K]
mesh_io_obj.cc[11.04K]
mesh_io_obj.h[1.02K]
mesh_io_off.cc[5.68K]
mesh_io_off.h[0.76K]
mesh_io_pbrt.cc[2.30K]
mesh_io_pbrt.h[0.61K]
mesh_io_ply.cc[38.92K]
mesh_io_ply.h[4.34K]
mesh_io_smf.cc[2.90K]
mesh_io_smf.h[0.79K]
mesh_tools.cc[9.79K]
mesh_tools.h[2.40K]
scene.cc[5.69K]
scene.h[3.84K]
view.cc[31.36K]
view.h[11.65K]
volume.cc[4.64K]
volume.h[3.22K]
examples[72.55M]
data[72.31M]
sequence[71.84M]
sequence_scene[6.06M]
surface_mesh_clean.ply[1.99M]
textured.conf[0.36K]
textured_data_costs.spt[4.07M]
IMG_0191.JPG[9.52M]
IMG_0192.JPG[9.51M]
IMG_0193.JPG[9.04M]
IMG_0194.JPG[9.10M]
IMG_0195.JPG[9.31M]
IMG_0196.JPG[9.50M]
IMG_0197.JPG[9.79M]
example.jpeg[273.98K]
kxm1.jpg[100.04K]
kxm2.jpg[107.90K]
task1[21.56K]
class1_test_features.cc[2.78K]
class1_test_matching.cc[9.48K]
CMakeLists.txt[0.63K]
visualizer.cc[7.17K]
visualizer.h[1.50K]
task2[66.87K]
calss2_test_pose_from_fundamental.cc[7.77K]
class2_test_camera.cc[2.96K]
class2_test_fundamental_8_point.cc[5.69K]
class2_test_fundamental_ransac.cc[8.49K]
class2_test_math_basic.cc[1.31K]
CMakeLists.txt[1.22K]
correspondences.txt[10.41K]
test_ba.txt[20.35K]
visualizer.cc[7.17K]
visualizer.h[1.50K]
task3[77.05K]
class3_test_bundle_adjustment.cc[13.66K]
class3_test_jacobian.cc[4.92K]
class3_test_lm_optimize.cc[33.70K]
class3_test_p3p.cc[0.28K]
class3_test_triangle.cc[3.16K]
CMakeLists.txt[0.97K]
test_ba.txt[20.35K]
task4[21.01K]
class4_test_incremental_sfm.cc[15.00K]
CMakeLists.txt[0.33K]
defines.h[0.64K]
functions.cc[3.74K]
functions.h[1.30K]
task5[25.59K]
class5_dmrecon_multi_views.cc[3.17K]
class5_dmrecon_single_view.cc[2.51K]
class5_scene2pset_multi_views.cc[5.75K]
class5_scene2pset_single_view.cc[13.19K]
CMakeLists.txt[0.96K]
task6[8.43K]
class6_surface_reconstruction.cc[8.11K]
CMakeLists.txt[0.33K]
task7[32.29K]
arguments.cpp[7.68K]
arguments.h[0.96K]
class7_meshclean.cc[6.31K]
class7_texrecon.cpp[16.42K]
CMakeLists.txt[0.92K]
CMakeLists.txt[0.16K]
features[130.55K]
cascade_hashing.cc[7.58K]
cascade_hashing.h[16.82K]
CMakeLists.txt[0.60K]
defines.h[0.40K]
exhaustive_matching.cc[5.22K]
exhaustive_matching.h[2.31K]
matching.cc[3.01K]
matching.h[6.18K]
matching_base.h[1.69K]
nearest_neighbor.cc[10.77K]
nearest_neighbor.h[3.12K]
sift.cc[34.23K]
sift.h[8.12K]
surf.cc[25.57K]
surf.h[4.94K]
math[159.98K]
accum.h[3.85K]
algo.h[7.85K]
bezier_curve.h[2.78K]
bspline.h[6.00K]
CMakeLists.txt[0.25K]
defines.h[4.29K]
functions.h[6.35K]
geometry.h[9.32K]
line.h[1.19K]
Makefile[0.32K]
matrix.h[18.30K]
matrix_qr.h[5.22K]
matrix_svd.h[28.51K]
matrix_tools.h[18.18K]
octree_tools.h[11.51K]
permute.h[3.68K]
plane.h[2.26K]
quaternion.h[7.88K]
transform.h[2.89K]
vector.h[19.33K]
mvs[92.99K]
CMakeLists.txt[0.71K]
defines.h[0.86K]
dmrecon.cc[16.53K]
dmrecon.h[2.06K]
global_view_selection.cc[3.44K]
global_view_selection.h[0.97K]
image_pyramid.cc[4.81K]
image_pyramid.h[1.93K]
local_view_selection.cc[4.92K]
local_view_selection.h[1.22K]
mvs_tools.cc[8.77K]
mvs_tools.h[2.09K]
patch_optimization.cc[12.17K]
patch_optimization.h[2.48K]
patch_sampler.cc[12.02K]
patch_sampler.h[4.83K]
progress.h[1.05K]
settings.h[1.44K]
single_view.cc[4.40K]
single_view.h[5.35K]
view_selection.h[0.94K]
sfm[290.15K]
ba_cholesky.h[3.56K]
ba_conjugate_gradient.h[5.40K]
ba_dense_vector.h[5.61K]
ba_linear_solver.cc[11.30K]
ba_linear_solver.h[2.97K]
ba_sparse_matrix.h[15.33K]
ba_types.h[0.97K]
bundle_adjustment.cc[27.48K]
bundle_adjustment.h[5.39K]
bundler_common.cc[8.30K]
bundler_common.h[5.36K]
bundler_features.cc[3.14K]
bundler_features.h[1.58K]
bundler_incremental.cc[26.35K]
bundler_incremental.h[4.34K]
bundler_init_pair.cc[13.02K]
bundler_init_pair.h[4.01K]
bundler_intrinsics.cc[4.59K]
bundler_intrinsics.h[1.84K]
bundler_matching.cc[7.06K]
bundler_matching.h[3.45K]
bundler_tracks.cc[7.30K]
bundler_tracks.h[1.74K]
camera_database.cc[41.36K]
camera_database.h[2.06K]
camera_pose.h[2.98K]
CMakeLists.txt[1.41K]
correspondence.h[1.31K]
defines.h[1.03K]
extract_focal_length.cc[1.57K]
extract_focal_length.h[1.99K]
feature_set.cc[3.48K]
feature_set.h[2.55K]
fundamental.cc[8.04K]
fundamental.h[7.89K]
homography.cc[2.61K]
homography.h[1.06K]
Makefile[0.36K]
pose_p3p.cc[7.84K]
pose_p3p.h[1.63K]
ransac.cc[0.71K]
ransac.h[1.10K]
ransac_fundamental.cc[3.17K]
ransac_fundamental.h[2.61K]
ransac_homography.cc[2.98K]
ransac_homography.h[2.49K]
ransac_pose_p3p.cc[4.04K]
ransac_pose_p3p.h[3.00K]
triangulate.cc[7.16K]
triangulate.h[3.62K]
surface[141.02K]
basis_function.cc[2.64K]
basis_function.h[8.86K]
CMakeLists.txt[0.64K]
defines.h[0.90K]
hermite.cc[4.97K]
hermite.h[1.67K]
iso_octree.cc[8.54K]
iso_octree.h[1.85K]
iso_surface.cc[45.32K]
iso_surface.h[3.94K]
mesh_clean.cc[8.70K]
mesh_clean.h[1.13K]
octree.cc[14.44K]
octree.h[9.43K]
sample.h[1.06K]
sample_io.cc[15.31K]
sample_io.h[2.53K]
triangulation.cc[2.60K]
triangulation.h[1.24K]
voxel.cc[2.21K]
voxel.h[3.04K]
texturing[203.53K]
build_adjacency_graph.cpp[1.84K]
build_obj_model.cpp[3.08K]
calculate_data_costs.cpp[12.66K]
CMakeLists.txt[1.86K]
debug.h[0.58K]
defines.h[0.42K]
generate_debug_embeddings.cpp[3.79K]
generate_texture_atlases.cpp[6.19K]
generate_texture_patches.cpp[22.98K]
generate_texture_views.cpp[8.47K]
global_seam_leveling.cpp[13.01K]
histogram.cpp[1.65K]
histogram.h[1.24K]
local_seam_leveling.cpp[8.73K]
material_lib.cpp[1.77K]
material_lib.h[1.02K]
obj_model.cpp[2.11K]
obj_model.h[1.81K]
partition_mesh.cpp[10.46K]
poisson_blending.cpp[4.54K]
poisson_blending.h[0.53K]
prepare_mesh.cpp[2.38K]
progress_counter.h[2.29K]
rect.h[2.48K]
rectangular_bin.cpp[2.55K]
rectangular_bin.h[1.42K]
seam_leveling.cpp[3.53K]
seam_leveling.h[1.35K]
settings.h[2.27K]
sparse_table.h[5.21K]
texture_atlas.cpp[8.66K]
texture_atlas.h[2.35K]
texture_patch.cpp[10.43K]
texture_patch.h[4.86K]
texture_view.cpp[11.03K]
texture_view.h[6.07K]
texturing.h[3.83K]
timer.cpp[1.86K]
timer.h[1.07K]
tri.cpp[0.75K]
tri.h[2.36K]
uni_graph.cpp[1.62K]
uni_graph.h[4.10K]
util.h[4.66K]
view_selection.cpp[7.65K]
tmp[893.96K]
kxm1.sift.png[589.51K]
matching_featureset.png[304.45K]
util[83.82K]
aligned_allocator.h[3.71K]
aligned_memory.h[0.65K]
arguments.cc[10.64K]
arguments.h[6.95K]
CMakeLists.txt[0.53K]
defines.h[1.20K]
exception.h[1.59K]
file_system.cc[16.05K]
file_system.h[7.26K]
frame_timer.h[3.44K]
ini_parser.cc[3.05K]
ini_parser.h[0.86K]
logging.h[2.32K]
Makefile[0.39K]
Makefile.dep[0.52K]
strings.h[11.18K]
system.cc[1.83K]
system.h[4.92K]
timer.h[3.34K]
tokenizer.h[3.37K]
CMakeLists.txt[0.77K]
README.md[0.10K]
第七章纹理图像的创建与编辑[1.35G]
07纹理图像的创建与编辑(上).ts[677.48M]
07纹理图像的创建与编辑(下).ts[682.84M]
纹理图像I.pdf[12.09M]
纹理图像II.pdf[12.58M]
第一讲视频需下载观看(在线观看无声音)[2.27G]
01第一章课程参考资料[37.07M]
参考书籍[36.88M]
book_ComputerVisionforVisualEffects.pdf[14.71M]
book_Computer_Vision_Algorithms_and_Applications.pdf[22.17M]
课程参考资料说明.pdf[190.09K]
01特征点检测与匹配.ts[1.12G]
02特征点检测与匹配.ts[1.12G]
三维重建经典论文[21.34M]
参考文献[20.83M]
DistinctiveImageFeaturesfromScale-InvariantKeypoints.pdf[788.85K]
Letitbecolor!Large-ScaleTexturingof3DReconstructions.pdf[4.87M]
Multi-ViewStereoforCommunityPhotoCollections.pdf[8.76M]
PhotoTourismExploringPhotoCollectionsin3D.pdf[1.64M]
PoissonImageEditing.pdf[1.77M]
ReconstructionandRepresentationof3DObjectswithRadialBasis.pdf[1.27M]
Structure-from-MotionRevisited.pdf[1.75M]
MTUZSXG8Y9L2J$2R)W02B[6.png[529.97K]
(课程代码)ImageBasedModellingEduV1.0-master.zip[71.08M]
045783F170AC5196A2F73AE0849960C3.png[49.78K]
ImagBasedModellingEdu代码说明文档.pdf[709.97K]
播放说明.txt[0.17K]
看看我.zip[14.66M]
课程代码.txt[0.06K]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
激光SLAM从理论到实践[14.65G]
:
第1节:激光SLAM简要介绍[628.07M]
【课件】3D激光SLAM介绍.pdf[775.15K]
【课件】传感器数据处理I:里程计运动模型及标定.pdf[651.33K]
【课件】基于滤波器的激光SLAM方法(Grid-based).pdf[955.07K]
【课件】基于图优化的激光SLAM方法(Grid-based).pptx[732.26K]
【课件】基于已知定位的建图.pdf[509.98K]
【课件】激光SLAM的发展和应用趋势.pdf[854.78K]
【课件】激光SLAM的前端配准方法.pdf[877.08K]
【课件】激光雷达数学模型和运动畸变去除.pdf[694.66K]
【视频】激光SLAM的发展和应用趋势.mp4[622.16M]
第2节传感器数据处理I:里程计运动模型及标定[1.57G]
【作业】传感器数据处理I:里程计运动模型及标定[120.77M]
odom_ws[120.75M]
.catkin_tools[6.26K]
profiles[5.67K]
default[5.67K]
packages[5.33K]
catkin_simple[0.52K]
package.xml[0.52K]
eigen_catkin[0.40K]
package.xml[0.40K]
glog_catkin[0.35K]
package.xml[0.35K]
hybrid_astar[0.66K]
package.xml[0.66K]
laser_filter[2.07K]
package.xml[2.07K]
mav_visualization[0.86K]
package.xml[0.86K]
nlopt[0.46K]
package.xml[0.46K]
build.yaml[0.35K]
README[0.58K]
VERSION
bag[120.54M]
odom.bag[120.54M]
src[205.15K]
calib_odom[204.49K]
.git[179.82K]
hooks[14.38K]
applypatch-msg.sample[0.47K]
commit-msg.sample[0.88K]
post-update.sample[0.18K]
pre-applypatch.sample[0.41K]
pre-commit.sample[1.60K]
prepare-commit-msg.sample[1.21K]
pre-push.sample[1.32K]
pre-rebase.sample[4.78K]
update.sample[3.53K]
info[0.23K]
exclude[0.23K]
logs[0.17K]
HEAD[0.17K]
objects[161.07K]
01[0.57K]
b1a863f1c2f31025e54e8ccf5d77fe4d50532a[0.57K]
02[2.97K]
fd4fed526b19f6c0a442e3e18e99f124e326b6[2.97K]
03[3.96K]
07c8f8af74c492f9e147818fb7f37926b9c0db[3.96K]
08[35.44K]
6d71001bf8fb68b37b291e5fe827f0c667bfd6[35.44K]
14[4.86K]
d8709a5d4f97132603912bc2cd6363f798c0e4[4.86K]
16[0.63K]
a151af0fc58f9aa4713e218a60dac2ae2ba020[0.63K]
1e[6.22K]
97a93d15ae9bbb786db46579f2c07d0f49bc87[6.22K]
28[4.07K]
2d10591361ceda148fe9c642fb52e1fe034609[1.92K]
2d3ecf1f8365b5901d9b7a6bb4e386f06cebe0[2.15K]
2c[0.17K]
eab4f4047d506a5af05e0951803d1112cbde8f[0.17K]
2f[1.16K]
21b37700d4c7a2a09ab58bbbfbb7d63eae3cb3[1.16K]
48[0.78K]
03857383c44061dc31a299dfe17b299ed6dbdc[0.78K]
56[2.52K]
250d8e0f88481585f7a6cafcdc4da4bb8bd292[2.52K]
62[33.51K]
6ae07f6fadee8877fd50541b8bc7be74e154ed[6.83K]
b373b735cee1f95a24518feab8e1841b16382e[26.68K]
69[0.07K]
4a61a009efaf756daeb293f770c36d06755ada[0.07K]
6a[0.57K]
2e6706991d7bd23d5a29e10fa8eb49c3812146[0.57K]
6d[0.28K]
ff541421c8b574d5dc54d127c881f59f3de1ed[0.28K]
6e[2.79K]
551c64c1576a8d209bb10a91df4738f8c6cb96[0.64K]
9d8ac4787e6be400995480b6d6eb1012c0560c[2.15K]
70[0.29K]
805a1ae4acade631d9e51b92f47bb88a4a1136[0.29K]
7a[3.82K]
b2cb4f3f58d7ef85574b336a86524cded2aa11[3.82K]
7d[1.15K]
6b8c24641e9b4bfb55975d40f7eea8552be635[1.15K]
7e[1.09K]
435f3884a07cc9df8414e559310b83818b2edb[1.09K]
81[11.77K]
2bd1413e54fa69637838ae55f81977e3bc2ed0[11.77K]
8c[0.05K]
ec188b38b9176886d417469a701b599d82970f[0.05K]
90[0.13K]
6a359499df63ced028d96ef37f0d35b87c161e[0.13K]
97[4.71K]
bc1fee209b5b21391425bbe352c84aa6b2e710[4.71K]
9d[2.35K]
9c7a1e45539b252f07efbb982c94ca66288f07[2.35K]
a4[2.18K]
e2b698243f88e77c4debb052f62502c4dec122[2.18K]
aa[1.07K]
62183db8e3ed201edf3adbb56af8df4c4a39f1[1.07K]
af[0.22K]
c557815c9e1a729d95d6d46211bd36e164b60f[0.22K]
b0[3.57K]
6471dfbf2c84a5987d73f2cc56c53a74cb327b[3.57K]
b2[2.15K]
ae8341fd76eb9dec2edff2f9bc11e12b08bb68[2.15K]
b4[0.75K]
b6fc5e4e08f1c8ce5a5f86a68d03c78ad6e40e[0.75K]
bc[0.12K]
ad92412c6968d46fdf1d49bd5265baa6b3c71a[0.12K]
be[0.41K]
9632a7db90e3119aad1c01904f7e8400fda66e[0.41K]
c9[3.89K]
043a93772cba215b693efe578fbbdf4c1889d1[2.44K]
b5bf9356b1c1d78e6c04aa2cb450cf7d11f6e3[1.45K]
d2[2.07K]
575813ae090a4d52943c0f0086b5aa584c2e85[1.43K]
d25aa7786689940171d2507beeb52eb31ce293[0.64K]
d5[0.05K]
460c9202cfa97255dbb217ba81d52cecea4d6e[0.05K]
d6[2.24K]
4b56718fb94d468dc1494cf404e40dc1cc4f2c[2.24K]
db[5.32K]
762f262ac8a36958638111ee5db738963f6827[5.32K]
dc[10.82K]
84ebd496912757455d1c6314483dacbe64f103[10.82K]
e2[0.06K]
0b7fc8e71ded3e06ec5f89387b5b4508e92322[0.06K]
e6[0.22K]
d0fb4a0f805d76df4905d6a90fcfc072657df9[0.22K]
e9[0.03K]
4cbbd3027df32cb00f4fca093d5c72d9696a85[0.03K]
refs[0.04K]
heads[0.04K]
master[0.04K]
COMMIT_EDITMSG[0.01K]
config[0.20K]
description[0.07K]
HEAD[0.02K]
index[3.62K]
include[0.56K]
calib_odom[0.56K]
Odom_Calib.hpp[0.56K]
launch[0.15K]
odomCalib.launch[0.15K]
src[15.81K]
main.cpp[14.65K]
Odom_Calib.cpp[1.16K]
CMakeLists.txt[6.15K]
package.xml[1.99K]
.rosinstall[0.50K]
.rosinstall.bak[0.11K]
CMakeLists.txt[0.05K]
.catkin_workspace[0.10K]
作业注意事项.docx[15.52K]
【视频】传感器数据处理I:里程计运动模型及标定.mp4[1.45G]
第3节传感器数据处理II:激光雷达数学模型和运动畸变去除[1.78G]
【视频】激光雷达数学模型和运动畸变去除.mp4[1.78G]
【作业】激光雷达数学模型和运动畸变去除.zip[1.57M]
第4节激光SLAM的前端配准方法[2.57G]
【视频】激光SLAM的前端配准方法(1).mp4[1.10G]
【视频】激光SLAM的前端配准方法(2).mp4[613.97M]
【视频】激光SLAM的前端配准方法(3).mp4[894.00M]
第5节基于滤波器的激光SLAM方法(Grid-based)[3.00G]
【视频】基于滤波器的激光SLAM方法(Grid-based)(1).mp4[1.70G]
【视频】基于滤波器的激光SLAM方法(Grid-based)(2).mp4[801.73M]
【视频】基于滤波器的激光SLAM方法(Grid-based)(3).mp4[527.76M]
【作业】基于滤波器的激光SLAM方法(Grid-based).zip[6.48M]
第6节基于图优化的激光SLAM方法(Grid-based)[2.20G]
【视频】cartographer代码讲解.mp4[796.70M]
【视频】基于图优化的激光SLAM方法(Grid-based)(1).mp4[936.52M]
【视频】基于图优化的激光SLAM方法(Grid-based)(2).mp4[514.28M]
【作业】基于图优化的激光SLAM方法(Grid-based).zip[568.83K]
cartographer(注释版本).zip[816.75K]
第7节基于已知定位的建图[1.17G]
【视频】基于已知定位的建图.mp4[1.17G]
【作业】基于已知定位的建图.zip[5.80M]
第8节3D激光SLAM介绍[1.28G]
:
【视频】3D激光SLAM介绍.mp4[1.24G]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
第9节作业答疑课[443.29M]
激光SLAM作业答案.rar[33.56M]
作业答疑课.mp4[409.73M]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
三维点云课程[118.29G]
:
3d数据集[114.53G]
3DPCL数据集[57.27G]
KITTI_depth[19.95G]
devkit[117.68K]
cpp[112.40K]
evaluate_depth[90.17K]
evaluate_depth.cpp[10.71K]
io_depth.h[9.47K]
log_colormap.h[0.31K]
make.sh[0.20K]
utils.h[1.55K]
matlab[0.15K]
depth_read.m[0.15K]
python[0.44K]
read_depth.py[0.44K]
readme.txt[4.68K]
data_depth_annotated.zip[13.26G]
data_depth_selection.zip[1.87G]
data_depth_velodyne.zip[4.81G]
KITTI_object[15.40G]
data_object_label_2.zip[5.34M]
data_object_velodyne.part1.rar[15.00G]
data_object_velodyne.part2.rar[402.13M]
KITTI_odometry[20.33G]
data_odometry_velodyne[20.33G]
1-10.rar[9.81G]
11-21.rar[10.52G]
data_odometry_poses.zip[1.25M]
devkit_odometry.zip[16.40K]
modelnet40_normal_resampled.zip[1.59G]
KITTI_depth[19.95G]
devkit[117.68K]
cpp[112.40K]
evaluate_depth[90.17K]
evaluate_depth.cpp[10.71K]
io_depth.h[9.47K]
log_colormap.h[0.31K]
make.sh[0.20K]
utils.h[1.55K]
matlab[0.15K]
depth_read.m[0.15K]
python[0.44K]
read_depth.py[0.44K]
readme.txt[4.68K]
data_depth_annotated.zip[13.26G]
data_depth_selection.zip[1.87G]
data_depth_velodyne.zip[4.81G]
KITTI_object[15.40G]
data_object_label_2.zip[5.34M]
data_object_velodyne.part1.rar[15.00G]
data_object_velodyne.part2.rar[402.13M]
KITTI_odometry[20.33G]
data_odometry_velodyne[20.33G]
sequences[20.33G]
1-10.rar[9.81G]
11-21.rar[10.52G]
data_odometry_poses.zip[1.25M]
devkit_odometry.zip[16.40K]
modelnet40_normal_resampled.zip[1.59G]
imgs[430.77K]
1.jpg[143.69K]
2.png[139.45K]
3.png[84.42K]
4.png[63.21K]
第八次课[339.96M]
:
8.1PFH&&FPFH.mp4[68.19M]
8.2SHOT.mp4[51.64M]
8.33D_match&&perfect_match.mp4[97.66M]
8.4PPFNet&&PPF_folder.mp4[74.37M]
PointCloudLecture8-ld-2020.5.23.pdf[4.05M]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
第二次课[314.31M]
第二次课ppt[3.48M]
PointCloudLecture2v3.0.pdf[3.48M]
2.1_binary_search_tree.mp4[131.83M]
2.2_KD-tree.mp4[84.34M]
2.3_Octree.mp4[91.15M]
lesson2code.zip[19.50K]
PointCloudLecture2v3.0.pdf[3.48M]
第九次课[591.55M]
9.1ICP_1.mp4[61.81M]
9.2ICP_2.mp4[62.26M]
9.3ndt.mp4[83.99M]
9.4ransac.mp4[21.32M]
PointCloudLecture9.pdf[2.96M]
registration_dataset.zip[359.22M]
第六次课[606.26M]
6.1introduction.mp4[137.91M]
6.2image-basedobjectdetection.mp4[178.71M]
6.3voxelnet&pointillar.mp4[127.08M]
6.4pointRCNN.mp4[90.89M]
6.5pointcloud&imagefusion.mp4[65.25M]
PointCloudLecture6.pdf[6.42M]
第七次课[405.32M]
7.1introduction&&harris2d.mp4[129.09M]
7.2harris3d.mp4[70.24M]
7.3ISS.mp4[22.80M]
7.4USIP.mp4[124.18M]
7.5SO-NET.mp4[53.13M]
PointCloudLecture7-ld-2020.5.21.pdf[5.89M]
第三次课[387.27M]
3.1mathprerequisite.mp4[67.56M]
3.2K-means.mp4[79.55M]
3.3GMM.mp4[93.61M]
3.4EM.mp4[78.56M]
3.5Spectralclustering.mp4[64.61M]
PointCloudHomeworkIII.rar[4.09K]
PointCloudLecture3Clustering.pdf[3.38M]
第四节课[373.76M]
4.1spectralclusterig.mp4[192.47M]
4.2meanshift&dbcan.mp4[87.49M]
4.3least_square.mp4[32.79M]
4.4ransac.mp4[57.73M]
HomeworkIVclustering.rar[1.35K]
pointcloudLecture4Clustering&Modelfitting.pdf[3.28M]
第五节课[405.94M]
5.1deeplearningintroduction.mp4[175.00M]
5.2pointnet.mp4[135.79M]
5.3pointnet++.mp4[90.52M]
PointCloudLecture5DeepLearningwithPointClouds.pdf[4.63M]
第一次课,声音正常版本[380.49M]
1-Introduction.mp4[48.93M]
2-PCA.mp4[64.69M]
3-kernelPCA.mp4[51.75M]
4-.mp4[210.90M]
5-(作业)PointCloudHomeworkI.rar[91.63K]
6-(ppt)PointCloudLecture1v4.0.pdf[4.14M]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
重要链接,一个同学的参考答案.txt[0.06K]
资料2.zip[14.66M]
深蓝–计算机视觉应用基础
第10章检测识别:一般目标检测识别之特征
第1节目标检测识别一般流程
第2节特征检测简介
第3节边缘检测与角点检测
第4节SIFT特征简介
第11章检测识别:一般目标检测识别之分类器
第1节线性回归
第2节支持向量机
第3节Adaboost
第12章检测识别:基于模型拟合的目标检测
第1节前言
第2节霍夫变换与直线检测
第3节RANSAC与直线检测
第1节:课程介绍
第1章:图像分割:基于统计模型的图像分割
第1节:图像分割简要叙述
第2节:基于统计的图像分割
第3节:作业
第2章:图像分割:基于主动轮廓的图像分割
第1节:基于主动轮廓的图像分割
第2节:Snake算法实现
第3节:GVFSnake算法
第4节:代码及作业
第5节:补充材料
第3章:图像分割:基于水平集的图像分割
第1节:CV图像分割模型
第2节:CV分割模型的改进
第3节:水平集分割模型代码分析
第4节:作业实践
第4章:图像分割:交互式图像分割
第1节:交互式图像分割简介
第2节:GraphCuts(图割)方法以及改进
第3节:基于标签学习的交互式分割
第4节:作业框架讲解
第5章:图像分割:基于模型的运动分割
第1节:运动目标检测简介
第2节:混合高斯背景建模
第3节:作业
第6章:目标跟踪:基于光流的点目标跟踪
第1节:目标跟踪简介
第2节:光流以及基于光流的跟踪
第3节:基于光流目标跟踪的代码分析
第4:实践作业
第7章:目标跟踪:基于均值漂移的块目标跟踪
第1节:均值漂移算法提出原因
第2节:核密度估计
第3节:基于均值漂移的目标跟踪算法
第4节:基于均值漂移目标跟踪算法的代码分析
第5节:作业
第8章:目标跟踪:基于粒子滤波的目标跟踪
第1节:自顶向下的跟踪基础
第2节:蒙特卡洛模拟
第3节:基于粒子滤波的目标跟踪算法
第4节:作业
第9章:目标跟踪:基于核相关滤波的目标跟踪
第1节:相关滤波
第2节:MOSSE
第3节:跟踪方法总结与展望
第4节:作业
深蓝人脸识别
FaceRecognition
第1章人脸识别概述
第2章传统人脸识别方法
第3章基于深度学习的人脸识别-前瞻
第三章数据
第4章基于深度学习的人脸识别-网络结构
第5章基于深度学习的人脸识别-损失函数(2次课)
第6章基于深度学习的人脸识别-数据
第7章人脸识别模型压缩
深蓝图卷积神经网络[1.16G]
:
01.第1章基础知识:图像基础知识[14.28M]
1.图像基础知识.mp4[14.28M]
02.第2章卷积神经网络[703.61M]
:
高薪学习it网.url[0.05K]
海量优质it资源.url[0.05K]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
任务2-1:【课件】卷积神经网络-1.pptx[21.88M]
任务2-2:【视频】前馈神经网络-_.mp4[194.31M]
任务2-3:逻辑“与”.doc[40.50K]
任务3-1:【课件】卷积神经网络-I.pdf[5.00M]
任务3-2:【视频】卷积神经网络parti-_.mp4[222.27M]
任务4-1:【课件】卷积神经网络-II.pdf[5.71M]
任务4-2:【视频】卷积神经网络partii-_.mp4[210.36M]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
03.第3章卷积的扩展[128.45M]
任务5-1:【课件】卷积的扩展.pdf[2.11M]
任务5-2:【视频】卷积的扩展-_.mp4[126.33M]
04.第4章基于图的卷积网络[298.75M]
任务6-1:【课件】基于图的卷积网络.pdf[2.05M]
任务6-2:【视频】基于图的卷积网络-_.mp4[135.58M]
任务7-1:【课件】交通预测任务中的时空信息_20190824_003033.pdf[4.22M]
任务7-2:【视频】交通预测任务中的时空信息-_.mp4[156.90M]
高薪学习it网.url[0.05K]
海量优质it资源.url[0.05K]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
视觉SLAMVIO开源代码解析[27.26G]
:
代码解析课前预习资料-深蓝学院[13.50M]
MSCKF_VIO[6.07M]
AMulti-StateConstraintKalmanFilter_forVision-aidedInertialNavigation.pdf[471.05K]
IndirectKalmanFilterfor3DAttitudeEstimation.pdf[340.81K]
MSCKF_VIO课前学习资料说明.pdf[62.96K]
OntheconsistencyofVision-aidedInertial.pdf[1.13M]
RobustStereoVisualInertialOdometryforFast.pdf[4.09M]
ORB_SLAM2[7.43M]
Bags_of_Binary_Words_for_Fast_Place_Recognition_in_Image_Sequences.pdf[1.07M]
Closed-form_solution_of_absolute_orientation_using_unit_quaternions.pdf[1.40M]
EPnP
MurMontielTardosTRO15.pdf[3.98M]
ORB_an_efficient_alternative_to_SIFT_or_SURF.pdf[999.98K]
ORB-SLAM2
第二章DSO[9.36G]
第二节[2.98G]
01.mov[1.04G]
02.mov[1.78G]
03.mov[80.95M]
DSO.pdf[1.15M]
HW2(学员).zip[74.01M]
第三节[2.51G]
01.mov[868.86M]
02.mov[1.66G]
DSO-HW3.zip[117.82K]
DSO代码解析第三节-滑窗优化-gyq.pdf[1.91M]
第一节[3.82G]
01.mov[1.33G]
02.mov[2.48G]
DSO代码解析第一节-系统框架与初始化-gyq.pdf[1.89M]
DSO第一节作业.zip[1.33M]
作业解析[48.55M]
DSO第一次作业.mov[18.91M]
DSO第一次作业.mp4[29.64M]
第三章VINS[1.32G]
:
第二节[489.36M]
01.mov[484.72M]
VINS解析_后端.pdf[4.64M]
第三节[392.21M]
01.mov[359.67M]
VINS解析_L3.pdf[32.54M]
第一节[426.15M]
01.mov[422.32M]
第三章VINS解析-前端.pdf[3.83M]
高薪学习it网.url[0.05K]
海量优质it资源.url[0.05K]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
第四章BASALT[1.08G]
第二节[171.92M]
34【课件】VIO因子图.pdf[1.54M]
35批量优化&滑窗优化、IMU因子、IMU偏置因子.mp4[93.03M]
36.IMU因子的代码实现、视觉因子、FET.mp4[77.35M]
第三节[147.37M]
37-1【课件】后端滑窗优化.pdf[2.41M]
37-2后端滑窗优化.mp4[122.82M]
37-3Basalt硬件介绍.mp4[22.13M]
第一节[787.10M]
01.mov[168.05M]
02.mov[69.76M]
03.mov[125.93M]
04.mov[82.46M]
05.mov[28.99M]
06.mov[310.45M]
basalt视觉前端.pdf[1.46M]
第五章MSCKF[1.09G]
第二节[414.62M]
40-2先导知识.mp4[71.20M]
40-3后端流程.mp4[137.15M]
41-1后端源码解析.mp4[206.27M]
第三节[236.15M]
40-1stereo_msckf源码分析-后端.pdf[4.95M]
41-2后端补充资料.mp4[231.21M]
第一节[468.61M]
39-1MSCKF前端.pdf[624.26K]
39-2MSCKF前端流程.mp4[184.85M]
39-3MSCKF前端开源代码讲解.mp4[218.87M]
39-4MSCKF_vio_no_ros.tar[64.28M]
第一章ORB_SLAM2[13.85G]
第二节VO与重定位[2.59G]
01.mov[1.22G]
02.mov[1.36G]
2.orbslam2源码分析-视觉里程计.pdf[773.37K]
第三节局部优化[665.85M]
局部优化.mov[665.85M]
第四节全局闭环[746.22M]
全局闭环.mov[746.22M]
第五节实践作业[2.09M]
hw3[309.95K]
demo[15.19K]
main.cpp[15.19K]
doc[14.68K]
hw3.png[14.68K]
src[12.46K]
two_view_geometry.cpp[11.51K]
two_view_geometry.h[0.95K]
CMakeLists.txt[0.79K]
README.md[0.50K]
README.pdf[266.32K]
hw2.pdf[280.51K]
hw4.zip[916.93K]
orbslam2_course.zip[355.92K]
代码解析-hw3.zip[281.73K]
第一节预备知识[9.72G]
1.orbslam2源码分析-视觉几何-0221.pdf[8.72M]
5-1.mp4[405.61M]
5-2.mp4[240.24M]
5-3.mp4[157.75M]
6-1.mov[4.25G]
6-2.mov[3.69G]
orbslam2源码分析-视觉几何.pdf[6.88M]
预备知识1.mp4[472.38M]
预备知识2.mp4[533.33M]
作业讲解[160.40M]
1-2次作业.mov[84.12M]
1-2次作业讲解视频.mp4[76.28M]
开课视频[224.80M]
OSVA5926.mp4[224.80M]
聊天记录[224.80M]
1-14–2-11.mp4[224.80M]
[深蓝学院]视觉SLAM_VIO开源代码大纲.pdf[136.28K]
32-1basalt视觉前端(1).pdf[1.46M]
ORB_SLAM2预习资料.zip[11.93M]
orbslam2_course.zip[355.92K]
高薪学习it网.url[0.05K]
海量优质it资源.url[0.05K]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
课前学习资料(MSCKF_VIO论文及代码)-深蓝学院.zip[5.88M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
深蓝slamvio代码课学习论文材料.zip[43.74M]
下载必看.txt[0.16K]
资料2.zip[14.66M]
视觉SLAM理论与实践[10.15G]
:
课件及作业[512.76M]
【课件】第七讲后端优化.pptx[8.68M]
【作业】后端优化作业及.zip[5.91M]
SLAM第二讲作业[1.72M]
SLAM第六讲作业[5.90M]
SLAM第三讲作业.zip[4.54M]
SLAM第四讲作业及[3.51M]
SLAM第五讲作业[2.32M]
SLAM理论与实践第六次课.pdf[820.86K]
大作业.pdf[208.79K]
第08讲【课件】回环检测.pptx[6.70M]
第二讲:三维空间的刚体运动.pptx[5.03M]
第三讲:李群与李代数.pptx[1.36M]
第四讲:相机模型与非线性优化.pptx[2.83M]
第五讲:特征点法视觉里程计.pptx[2.10M]
第一讲:SLAM概述与预备知识.pptx[389.08M]
第一讲作业[72.10M]
【课件】第六讲后端优化.mp4[375.58M]
【视频】第七讲后端优化.mp4[2.33G]
slam高博.zip[70.20M]
第08讲【视频】回环检测.mp4[1.10G]
第二讲:三维空间刚体运动.mp4[984.45M]
第三讲:李群与李代数.mp4[707.56M]
第四讲:相机模型与非线性优化.mp4[1.66G]
第五讲:特征点法视觉里程计.mp4[1.58G]
第一讲:预备知识.mp4[860.07M]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
移动机器人运动规划[4.13G]
路径规划–深蓝学院网课–深蓝[4.13G]
:
第八节[442.86M]
第8节模型预测控制在运动规划中的应用.pdf[4.09M]
第八章上.mp4[187.97M]
第八章下.mp4[134.66M]
第八章中.mp4[116.15M]
第二节[375.73M]
:
2hw_2.zip[6.14M]
2lecture2.pdf[2.79M]
2任务1-2图搜索基础.mp4[83.25M]
2任务2Dijstra和Astar算法.mp4[148.49M]
2任务3JPS算法.mp4[80.68M]
2任务4实践演示与作业.mp4[10.32M]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
第二章作业答案参考[962.30K]
1.jpg[179.59K]
2.jpg[299.03K]
3.jpg[144.65K]
4.jpg[90.29K]
5.jpg[112.79K]
6.jpg[135.95K]
第六节[523.95M]
hw6.zip[312.62K]
L6.pdf[3.21M]
轨迹优化.mp4[453.58M]
作业.mp4[66.86M]
第七节[455.27M]
MDPBasedplanning.pdf[2.67M]
MP-HW7.zip[4.14M]
规划中的不确定性和马尔科夫决策过程.mp4[153.17M]
值迭代和实时动态规划.mp4[61.83M]
最小最大代价规划和最小期望代价规划.mp4[233.46M]
第三节[333.44M]
3hw_3.zip[5.40M]
3任务1-1基于采样的路径规划.pdf[2.63M]
3任务1-2概率路线图算法.mp4[160.97M]
3任务2基于采样的最优路径规划算法.mp4[164.45M]
第三章作业解析[1.46M]
11.png[298.28K]
12.png[486.83K]
13.png[457.18K]
14.png[249.14K]
第四节[587.85M]
4实践演示与作业.mp4.tar[8.89M]
第四节.zip[578.96M]
第五节[464.62M]
hw_5.zip[5.87M]
L5.pdf[2.23M]
MinimumSnap1.mp4[212.94M]
MinimumSnap2.mp4[243.58M]
第一节[953.12M]
1hw_1.zip[5.54M]
1lecture1.pdf[4.03M]
1任务1-2课程总体介绍.mp4[215.50M]
1任务2课纲介绍与规划方法分类.mp4[186.90M]
1任务3常用地图结构与基础知识.mp4[80.41M]
1任务4实践演示.mp4[460.74M]
问题汇总[32.85M]
01.png[67.94K]
02.png[58.99K]
03-1.png[102.88K]
03-2.png[108.69K]
03-3.png[93.91K]
04.png[99.61K]
05.png[111.49K]
06.png[194.03K]
07.png[69.52K]
08.png[116.94K]
09.png[128.33K]
10-1.png[370.77K]
10-2.png[385.01K]
11.png[99.93K]
12.png[165.50K]
13.png[753.68K]
14-1.png[256.01K]
14-2.png[206.02K]
15.png[254.16K]
16.png[116.03K]
17.png[108.91K]
18.png[242.02K]
19.png[117.86K]
20.png[67.76K]
21.png[59.63K]
2-1.png[266.90K]
22.png[105.77K]
2-2.png[118.00K]
23.png[59.31K]
24.png[94.60K]
25.png[100.00K]
26.png[92.94K]
27.png[669.65K]
28.png[94.75K]
29.png[210.12K]
30.png[92.95K]
31.png[60.71K]
3-1.png[267.28K]
32.png[235.10K]
3-2.png[208.40K]
33.png[53.11K]
34.png[44.96K]
问题!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!.mp4[25.88M]
资料[13.73M]
bookbig.pdf[13.02M]
运动规划-开课仪式.pdf[736.43K]
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
资料2.zip[14.66M]
语音识别课程-2020[4.05G]
02.资料[43.33M]
EMG&MM-20200122.pdf[1.23M]
HMM模型.pdf[10.57M]
第二章作业.png[130.07K]
第三章作业.png[102.77K]
第四章作业.png[329.67K]
语音识别课程-01-Intro-谢磊-v1.3.pdf[29.47M]
语音识别课程PPT-02-特征提取-孙思宁-v0.2.pdf[1.51M]
04-HMM[475.35M]
:
看看我.zip[14.66M]
课程总结.mp4[14.73M]
面试合集.txt[0.18K]
软件下载.txt[0.15K]
下载必看.txt[0.16K]
语音识别课程PPT-04-HMM-许开拓v0.2.pdf[10.57M]
语音识别课程PPT-04-HMM-许开拓v0.2.pptx[12.29M]
语音识别课程第4节-隐马尔科夫模型.mp4[408.44M]
资料2.zip[14.66M]
05-GMM-HMM系统[532.62M]
语音识别-05-GMM-HMM系统-张彬彬.mp4[529.79M]
语音识别课程PPT-05-GMM-HMM-张彬彬.pptx[2.83M]
语音识别第3节-GMM&EM.mp4[400.93M]
语音识别课程-01-Intro-谢磊-v1.1.mp4[305.24M]
语音识别课程-01-Intro-谢磊-v1.1.pdf[29.52M]
语音识别课程PPT-07-语言模型-吕航.mp4[567.73M]
语音识别课程PPT-10-端到端语音识别-许开拓v2.mp4[307.69M]
语音识别课程大纲-深蓝学院.pdf[228.12K]
语音识别课程-开课仪式.pptx[19.68M]
语音识别一期C2-V1.0.mp4[365.66M]
语音识别一期C2-V2.0.mp4[1.07G]
课程下载地址:
精品课程,SVIP下载,下载前请阅读上方文件目录,链接下载为百度云网盘,如连接失效,可评论告知。